|
|
|
|
|
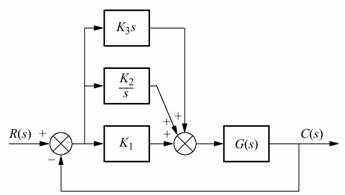
PID知多少? PID控制是指比例(proportional)、積分(integral)、微分(derivative)控制,最早在1885年一位俄國人Nicholas Minorsky他將其所發展的理論應用在船隻的自動導航上。從此奠定它在控制上的地位,根據筆者的了解,在工業界雖然近代有許多控制理論應用在先進的科技上,但在一般工業控制應用上,如位置、速度、溫度、濃度等的控制仍有近90%沿用傳統的PID控制。 一個典型的PID控制器可以下圖表示其方塊圖
典型的PID控制器方塊圖 一般控制設計中要改善的方向有二:一是改善暫態響應,一是降低穩態誤差,而PID控制器即可同時改善暫態響應與降低穩態誤差。有時在應用上會只使用PI或PD控制,其中PI控制主要是用來降低穩態誤差而PD控制主要是用來改善暫態響應。根據筆者的了解在工業上應用仍以PI居多,PD則較少被使用。在某些溫度的控制上如果將微分器放在回授的路徑上可以用來改善超越量的問題。 PID雖然是較為傳統的控制方式,但是在許多一般的控制上已綽綽有餘,值得同學一學。 |