|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
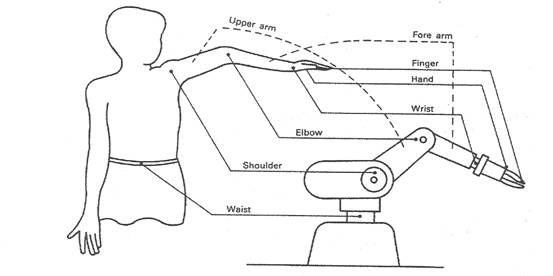
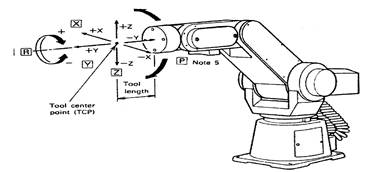
1 機器人其主要部份可分為八大項: 1.1軸名稱:機械手臂的關節名稱可比喻為人體,描述如下
圖1 軸名稱 1.2規格說明
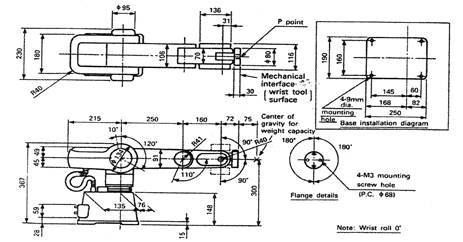
1.3手臂外觀與尺寸:
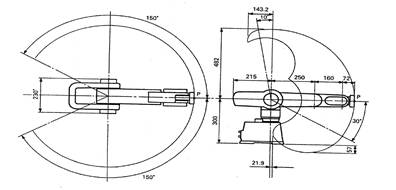
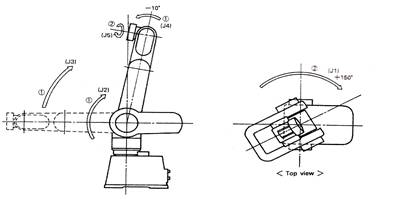
圖2手臂外觀與尺寸 1.4作業範圍:
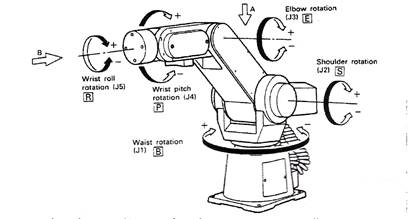
圖3作業範圍 ☆備註一:圖3表示出手臂的作業範圍,但這是假設Hand沒有裝 於手臂的情況。 ☆備註二:根據upper arm與fore arm的位置,Wrist斜度在設定 時可能需要有所設限,詳細部分參照附錄一所示。 1.5基本操作:
圖4 基本操作
圖5基本操作 備註一:從箭頭A和B的觀點來看,正方向會使J1、J5軸順時針旋轉。 備註二:J2、J3和J4軸工作於正方向,則Arm與Wrist將會往上旋轉。 備註三:直角座標中TCP(Tool center point)是以垂直的方式移動。 備註四:利用參數來設定工具長度。(參考TL指令) 備註五:P表示改變手臂姿勢的動作,不會移動到TCP。 備註六:Z表示在工具長度方向的前進與後退。 注意:
" " 符號表示是手臂輸入鍵盤的控制鍵。 1.6原點復歸:
圖6 原點復歸 I. Movemaster
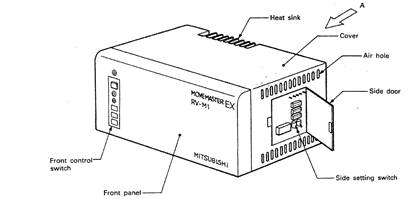
EX RV-M1 機械臂在電源打開後必須要做原點復歸動作。 II. 回歸原點的程序。 備註一:在步驟I、II 中,所有的軸會在同一時刻回歸原點。 備註二:於原點復歸後,Wrist(J5)滾轉角度為+179.9°。 1.7驅動單元: 【外觀圖】
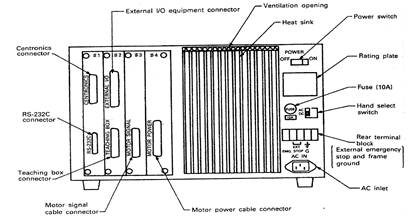
圖7外觀圖 【背視圖】
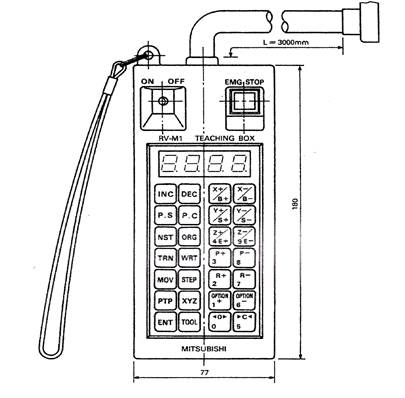
圖8背視圖 1.8 Teaching Box
圖9
Teaching Box * ON/OFF(電源開關) * EMG.STOP(緊急停此按鈕) * INC+ENT移動機械手臂到先前定義的位置數值大於現在位置數值的地方 * DEC+ENT移動機械手臂到先前定義的位置數值小於現在位置數值的地方 * P.S(+Number+ENT):用"位置數值"來定義機械手臂的現在位置 * P.C(+Number+ENT):清除已定義"位置數值"的內容 * NST(+ENT)回到機械原點 * ORG(+ENT)移動機械手臂到直角座標中的參考位置 * MOV(+Number+ENT)移動機械手臂到已設定的"位置數值"上 * ENT執行指令 * X+/B+移動手臂的末端至正X軸方向(直角座標中),而Waist也是以順時針的方向來動作(關節動作中) * X-/B-移動手臂的末端至負X軸方向(直角座標中),而Waist也是以逆時針的方向來動作(關節動作中) * Y+/S+移動手臂的末端至正Y軸方向(直角座標中),而Shoulder也是以順時針的方向來動作(關節動作中) * Y-/S-移動手臂的末端至負Y軸方向(直角座標中),而Shoulder也是以逆時針的方向來動作(關節動作中) * Z+/E+ 4移動手臂的末端至正Z軸方向(直角座標中),而Elbow也是以順時針的方向來動作(關節動作中),並且提供數字鍵"4" * Z-/E- 9移動手臂的末端至負Z軸方向(直角座標中),而Elbow也是以順時針的方向來動作(關節動作中),並且提供數字鍵"9" * P+ 3轉動手臂的末端至正(向上)的方向(直角座標中),或在關節動作中以正的方向彎曲Wrist(Pitch),並且提供數字鍵"3" * P- 8轉動手臂的末端至正(向下)的方向(直角座標中),或在關節動作中以負的方向彎曲Wrist(Pitch),並且提供數字鍵"8" * R+2旋轉Wrist(Wrist Roll)正(順時針)的方向,並且提供數字鍵"2" * R-7旋轉Wrist(Wrist Roll)正(逆時針)的方向,並且提供數字鍵"7" * OPTION+ 1移動任意於正的方向,並且提供數字鍵"1" * OPTION- 6移動任意於負的方向,並且提供數字鍵"6" * <O> 0打開夾爪,並且提供數字鍵"0" * >C< 5關閉夾爪,並且提供數字鍵"5" 2 機器人維修的重要性: 維修並不僅是增加保障,它也是防止故障以減少損失。 在晶圓產業上機器手臂的使用過於頻繁,故定期維修顯得很重要。 而維修的層級分為:
1. 調整維修。 2. 定期維修。 3. 故障修復。 3 機器人主要的特性: 機器人機身輕巧,安裝容易,擺設不佔空間。産業用機器人高性能化,最大合成速度1m/s實現運動時間的縮短。具有與電腦通訊能力(RS232C 串列通訊) 。 備註: RS232C簡介說明: 其中RS表示推薦標準 (recommend standard), 232 表示一個代碼,C 則代表所公佈的版本。 RS232C 屬於序列通訊 (Serial
Communication) 的標準,一次只傳輸一個位元 (bit) ,因此,利用 RS232C傳輸資料,在傳送端必須先將位元組 (byte) 分解成位元,接收端依序收到位元後,再將它們還原成為位元組。
在 PC 上負責 RS232C 通訊的元件,稱為
UART (Universal Asynchronous Receiver/Transmitter) 通用非同步收發傳輸器。而現在的 PC 通常會使用一顆
Super I/O 晶片 (提供序列埠、平行埠、遊戲埠、 MIDI 埠與軟碟機介面等等) ,來取代 16550 晶片。 在數位傳輸中,有串列(serial)傳輸與並列(parallel)傳輸兩類。串列傳輸的優點在於傳輸線少,配線簡單,距離遠,而並列傳輸的優點則為傳輸速度較快。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||